La naza solo gestiona gimbal de servos como bien dice Hinote, así que colocarlos en la Naza para controlar la ganancia no te sirve de nada ya que no hará absolutamente nada. Tienes que configurar el gimbal con su programa GUI correspondiente.
Un Saludo.
Entendido. De hecho el gimbal sólo con alimentación funcionaba. Fue cuando le conecté el cable para el tilt cuando se quemó el regulador de tensión.
Lo que no tengo ni idea es donde debo colocar ese cable para controlar el tilt desde la emisora DJI. ¿En el puerto X1 de la Naza? ( creo que es un canal de recepción). Si es así, resulta que ese puerto está ocupado por un cable de tres pines que va a la placa, pero sospecho que de allí sale luego al cable de 8 pines que controla el Zenmuse.
Os adjunto fotos del cable, donde lo coloqué todo, y de lo que comento del X1
Por cierto, como ya he mencionado, ya que el tilt no funcionaba en F2, conecté el cable blanco que en la foto no se ve al pin central, y ahí fue donde se quemó.

Cable para el tilt

Conexión de tres pines del pitch, en principio para el cable anterior

Detalle del puerto F2 con el cable puesto. Así no funcionaba y coloqué el blanco en el pin central, igual que en la conexión a la placa
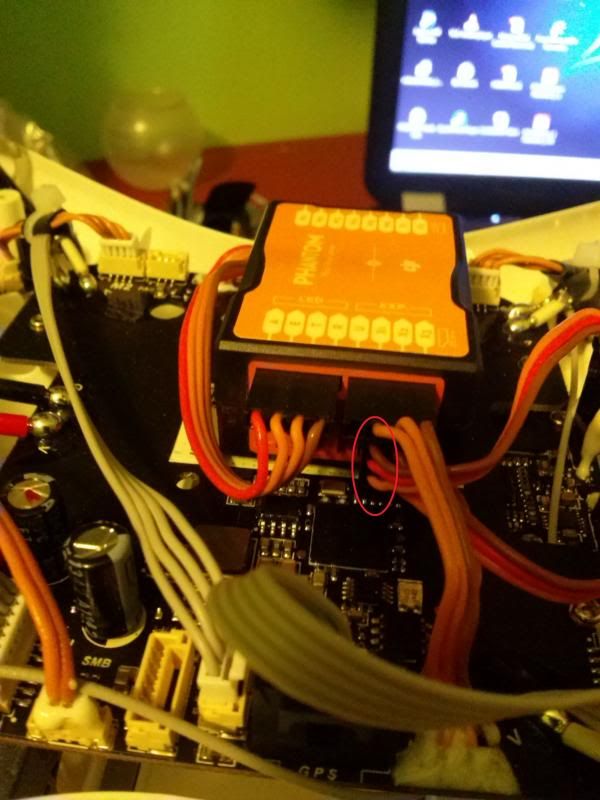
Detalle del puerto X1 ocupado por conector de tres pines que va a la placa


